Loading...
Vehicle Teleoperation with Haptic Feedback
ME 201 Final Project
Project Details
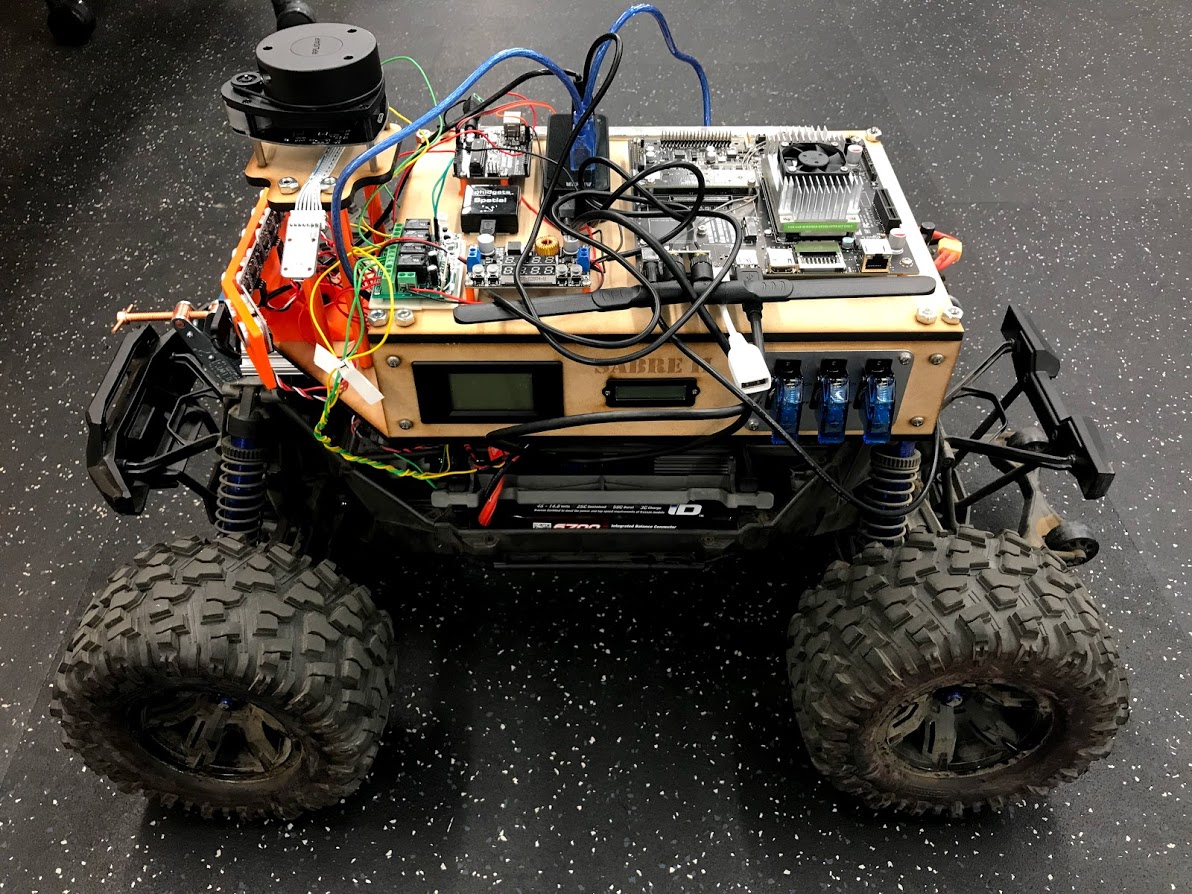
We used a Phantom Premium haptic manipulator with three degrees of freedom to teleoperate a child-size vehicle. An inertial measurement unit measured changes in vertical acceleration while traversing bumps and multiple ultrasonic distance sensors sensed obstacles ahead of the robot. This haptic interface allows for safer vehicle operation when combined with visual information.
- Date: May - June 2018
- Learn More: Final Report