RC Car
Project Details
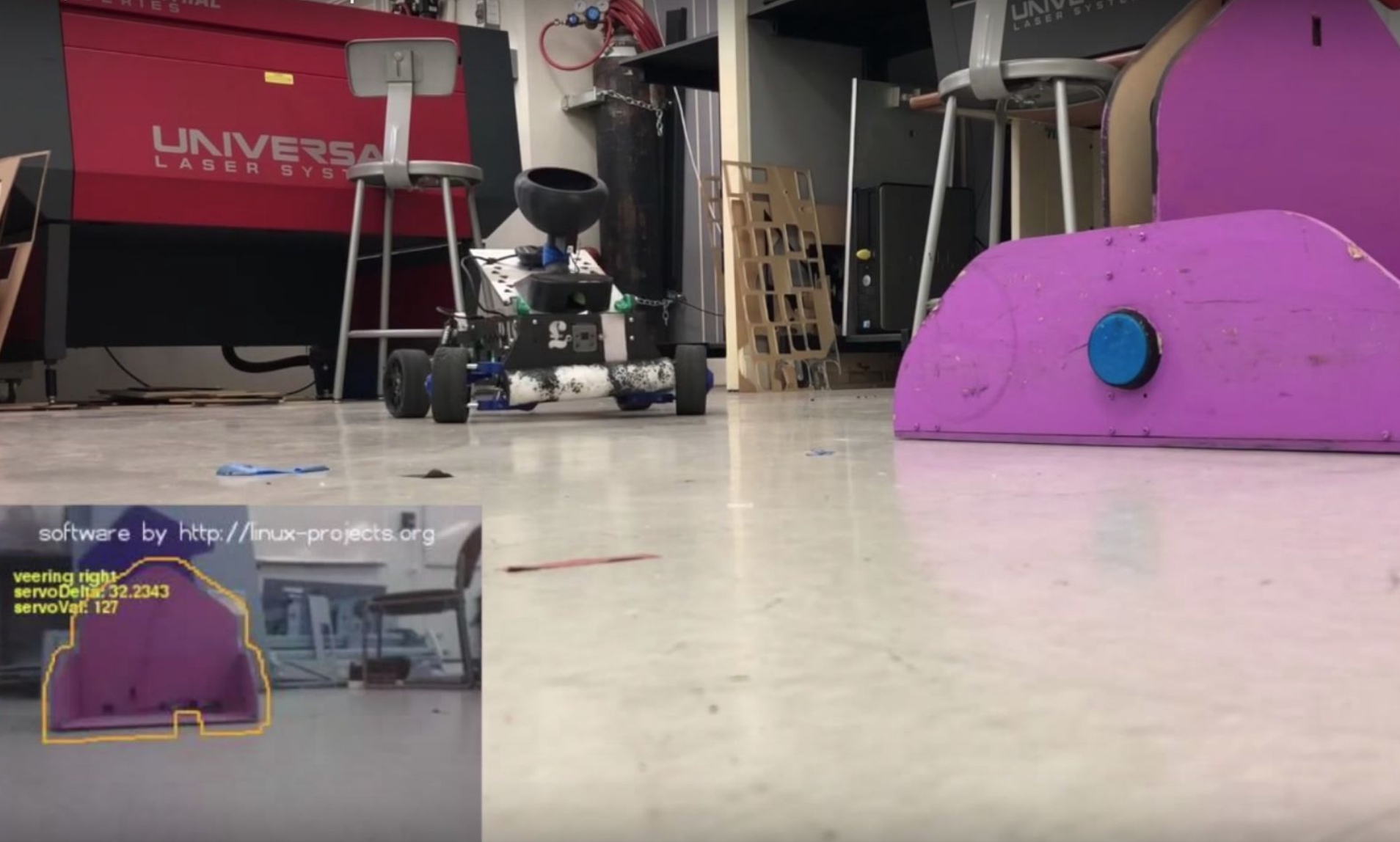
We worked in a team of 4 to design and fabricate 3 RC cars with Nerf ball shooters. We competed against 5 other teams in a bracket-style competition with bases to capture. The field had bumps, a ramp, and a see-saw, all on grass. Our design features Ackermann steering, double wishbone suspensions, and computer vision based autonomy.
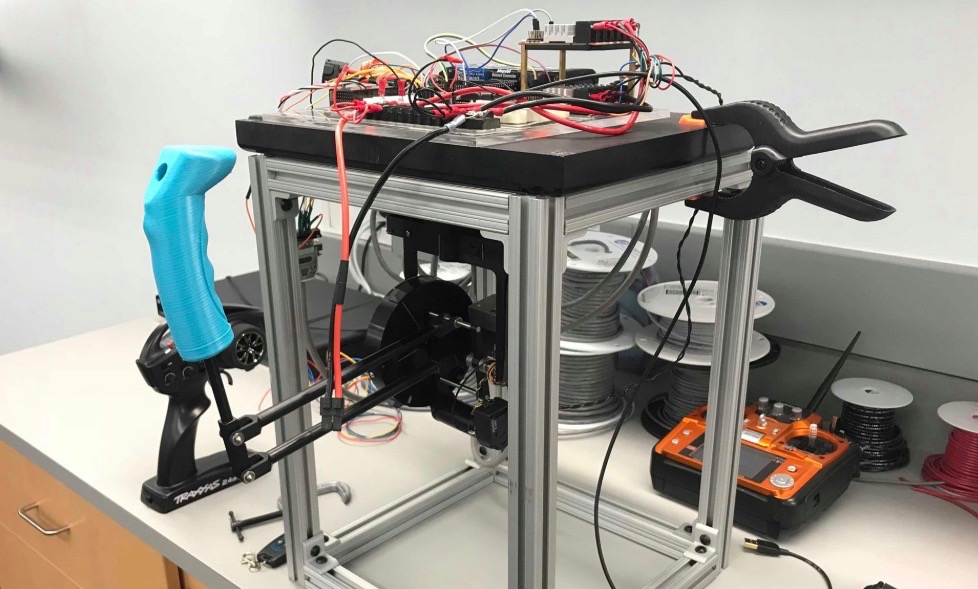
I was responsible for computer vision and the transmission subsystem. We implemented movement towards a target and obstacle avoidance using hue-based segmentation. For the transmission, we used a single stage gear reduction and telescoping driveshafts connected by universal joints, so the motor and gears would be part of the sprung mass. Our design was extremely robust, handling stairs, flips, and four foot drops. Our robot was easily the fastest of the competition. Additionally, I helped with the suspension and steering geometry.
- Date: Fall 2017 - Winter 2018