Cable Following with Tactile Perception
Project Details
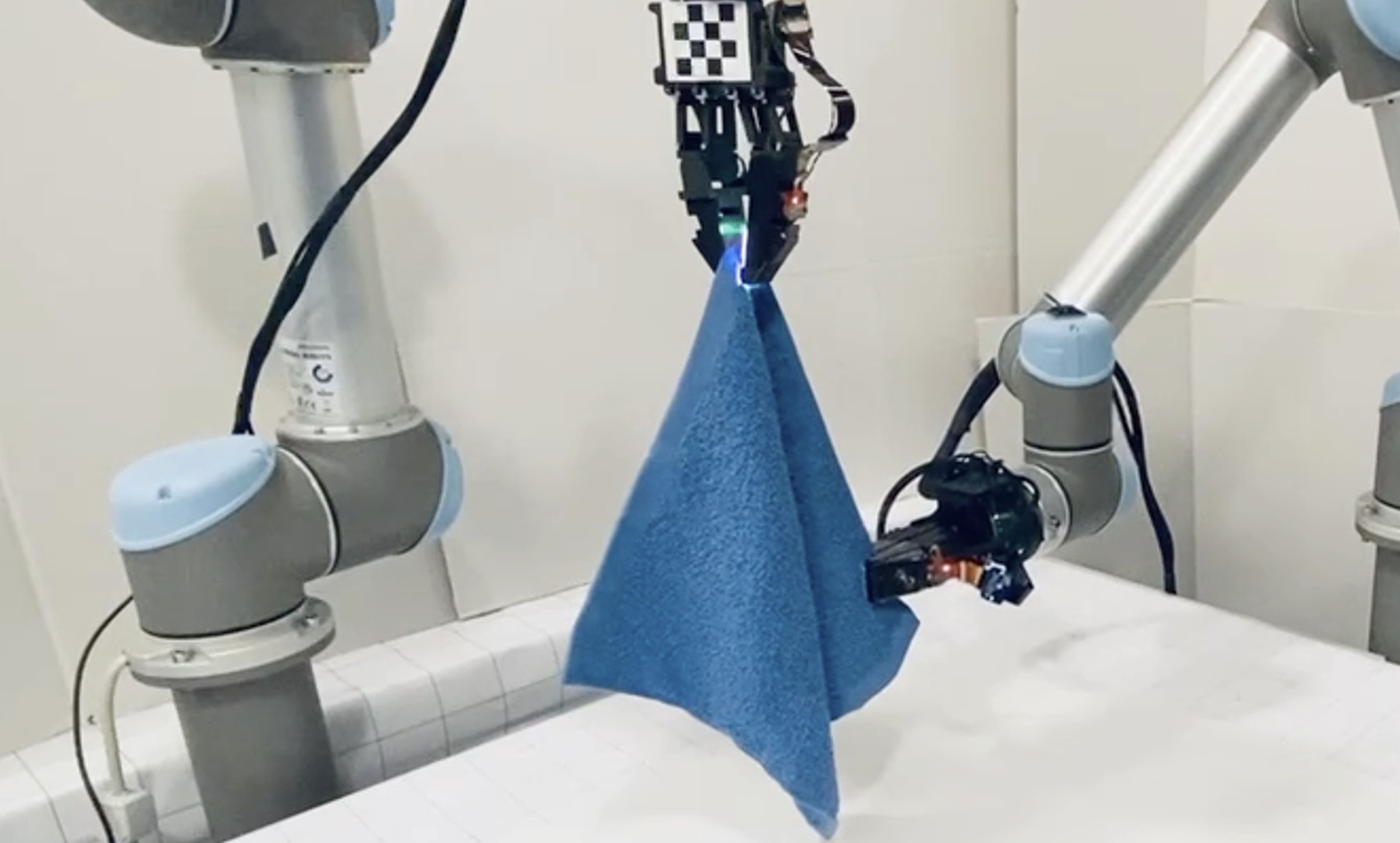
In this work, we develop a perception and control framework to enable robots to accomplish the task of following a cable. Cables are complex, high dimensional, and dynamic objects. Standard approaches to manipulate them often rely on conservative strategies that involve long series of very slow and incremental formations, or various mechanical fixtures such as clamps, pins or rings.
We are interested in manipulating freely moving cables, in real time, with a pair of robotic grippers, and with no added mechanical constraints. We rely on a vision-based tactile sensor, GelSight, to estimate the pose of the cable in the grip as well as the friction forces during cable sliding. We decompose the behavior of cable following into two tactile-based controllers: 1) the cable grip controller, where a PD controller combined with a leaky integrator are responsible for regulating the gripping force to maintain the frictional sliding forces close to a suitable value; and 2) the cable pose controller, where an LQR controller based on a learned linear model of the cable sliding dynamics is in charge of keeping the cable centered and aligned on the fingertips to prevent the cable from falling.
With the proposed framework, we show that the robot can follow one meter of cable in a random configuration from beginning to end within 2-3 hand regrasps. We further demonstrate that the closed-loop system adapts to cables with different materials and thicknesses, moving at different target velocities. To illustrate the potential of this system, we also show the robot following a headphone cable to the end and inserting it.
- RSS 2020 Best Paper Finalist
- Learn More: Website Paper RSS Video
- Media Coverage: MIT News TechCrunch Digital Trends Mashable PCMag Engadget